| Номер в госреестре | 80238-20 |
| Наименование СИ | Стенд испытаний навигационной аппаратуры потребителя в кинематическом режиме |
| Обозначение типа СИ | ГЮИД.464979.002 |
| Изготовитель | Акционерное общество "Центральный научноисследовательский машиностроения" (АО "ЦНИИмаш"), г. Королев, Московская обл. |
| Год регистрации | 2020 |
| МПИ (интервал между поверками) | 1 год |
| Описание типа | скачать |
| Методика поверки | скачать |
Стенд испытаний навигационной аппаратуры потребителя в кинематическом режиме ГЮИД.464979.002 (далее - СИНАКР) предназначен для измерений навигационных параметров по сигналам космических навигационных систем (далее - КНС) ГЛОНАСС и GPS при проведении испытаний образцов НАП и определении их рабочих характеристик в режиме движения по заданной траектории в пределах рабочей зоны стенда.
Принцип действия стенда основан на использовании его свойства воспроизводить траекторию движения антенны, или антенной системы из трех антенн с высокой точностью. Привязав точки такой траектории к заданной системе координат (например, WGS -84), данную траекторию можно использовать в качестве контрольной для тестирования НАП. Привязка моментов прохождения точек контрольной траектории к времени UTC осуществляется по сигналам секундной метки, которая выдается навигационным приемником, входящим в состав стенда. В процессе испытаний в синхронные моменты времени регистрируются координаты контрольной траектории и координаты, определенные испытываемой НАП.
Конструктивно СИНАКР состоит из: манипулятора на базе робота UR10, радиопро-зрачного укрытия с климатической установкой, навигационной аппаратуры NL3333 -A3, ГНСС антенны GrAnt-G5T, делителя-сумматора 1/8 ТИШЖ.468523.017, концентратора USB 3.0 TP-LINK UH700, переносного компьютера MSI GS73VR 7RF -228RU, IP-камеры Hikvision DS-2CD2023G0-I.
С помощью манипулятор на базе робота UR10 производится перемещение антенны испытываемой НАП по заданной траектории в пространстве и/или изменение ориентации антенной системы в соответствии с заданной программой.
На манипулятор могут устанавливаться кронштейны двух типов: кронштейн для перемещения одной антенны или кронштейн для перемещения системы из трех антенн.
Управление манипулятором производится с помощью 12" сенсорного планшета с графическим интерфейсом PolyScope, подключенного к контроллеру манипулятора.
Радиопрозрачное укрытие с климатической установкой обеспечивают необходимый температурный режим и защиту оборудования от атмосферных осадков.
Навигационная аппаратура NL3333 -A3 (далее - приемник, рисунок 2) предназначена для привязки данных о положении антенны к шкале времени UTC. Привязка к шкале времени производится на основе сигнала PPS приемника и времени, передаваемом приемником в NMEA-сообщениях. Сигнал PPS (pulse per second), секундная метка - аналоговый сигнал, представляющий собой последовательность импульсов TTL-уровня, идущих с заданным интервалом, как правило, 1 с. В зависимости от настройки передний фронт импульса соответствует границе секунд шкалы времени, к которой производится привязка.
Ежесекундные NMEA-сообщения, содержащие абсолютное значение времени, выдаются приемником на последовательный порт. Каждое сообщение следует за секундной меткой, времени которой оно соответствует.
ГНСС антенна GrAnt-G5T предназначена для приема сигналов глобальных навигационных систем (ГНСС) ГЛОНАСС/GPS и передачи их в приемник. При испытаниях НАП, не имеющей собственной антенны, антенна GrAnt-G5T используется для передачи сигналов ГНСС в эту НАП.
Делитель-сумматор 1/8 ТИШЖ.468523.017 предназначен для передачи сигналов ГНСС от одной антенны к нескольким приемникам при испытаниях НАП без собственной антенны (используется антенна GrAnt-G5T) и при одновременных испытаниях нескольких НАП.
Концентратор USB 3.0 TP -LINK UH700 предназначен для увеличения количества USB портов, к которым могут подключаться испытываемые НАП. Концентратор позволяет подключать до 7 устройств одновременно через USB 3.0.
Переносной компьютер MSI GS73VR 7RF-228RU (Рисунок 5) предназначен для:
- настройки аппаратуры навигационной NL3 333 - A3;
- регистрации выходных данных с аппаратуры навигационной NL3333 -A3;
- регистрации данных о реализованной при испытаниях траектории движения с робота манипулятора UR10;
- регистрации выходных данных с тестируемых образцов НАП.
IP-камера Hikvision DS-2CD2023G0-I предназначена для удаленного контроля за работой робота -манипулятора. PoE-инжектор Midspan-1/300GA обеспечивает питание камеры.
Пломбирование крепёжных винтов составных частей СИНАКР не производится, ограничение доступа к узлам обеспечено конструкцией составных частей.
Общий вид составных частей СИНАКР приведен на рисунках 1-6.
Рисунок 4 - Делитель-сумматор 1/8 ТИШЖ.468523.017
IP-камера РоЕ-инжектор
Рисунок 6 - IP-камера Hikvision DS-2CD2023G0-I с PoE-инжектором Midspan-1/300GA
СИНАКР поставляется со встроенным программным обеспечением (ПО), устанавливаемом на управляющем компьютере. В состав ПО входят две программы. Программа SINAKR предназначена для регистрации данных о реализованной при испытаниях траектории движения антенны и привязки ее координат к шкале UTC. Программа NMEA предназначена для регистрации показаний испытываемой НАП, которые выдаются в формате NMEA. Программа имеет многооконный интерфейс. В каждом из окон отображается различная информация о работе НАП - статус навигационных определений, текущие координаты, расположение НКА, мощность сигнала по каналам приемника, НКА, используемые при решении навигационной задачи и др. Программа позволяет строить графики изменения широты, долготы и высоты от времени, а также графики ошибок в определении этих величин от времени, если известны контрольные значения широты, долготы и высоты. Программа позволяет записывать NMEA-сообщения от НАП в текстовый файл. Разделение на метрологически значимое и не значимое ПО не произведено.
Уровень защиты ПО «низкий» в соответствии с Р 50.2.077 - 2014.
Таблица 1 - Идентификационные данные ПО
| Идентификационные данные (признаки) | Значение | |
| Идентификационное наименование ПО | RU.TO^.30096 | RUTO^.30028 |
| Номер версии (идентификационный номер ПО) | не ниже 1.2.2 | не ниже 1.6.4 |
| Цифровой идентификатор ПО | - | - |
| Алгоритм вычисления идентификатора ПО | - | - |
Таблица 2 - Метрологические характеристики
| Наименование характеристики | Значение |
| Доверительная граница допускаемой абсолютной погрешности определения координат фазового центра антенны (по уровню доверительной вероятности 0,67) 1), мм - в плане - по высоте | 20 30 |
| Доверительная граница допускаемой абсолютной погрешности определения приращения координат фазового центра антенны (по уровню доверительной вероятности 0,67) 1), мм | ±5 |
| 1) В заданной системе координат (ЗСК) при условии выполнения следующего ограничения: погрешность определения координат точек привязки стенда в ЗСК, при выполнении привязки стенда к ЗСК, не должна превышать 1 см | |
Таблица 3 - Основные технические характеристики
| Наименование характеристики | Значение |
| Диапазон рабочих температур, °С | |
| - Робот-манипулятор | от -5 до 50 |
| - ГНСС антенна GrAnt-G5T | от -45 до 85 |
| Напряжение питания от сети переменного тока частотой от | |
| 50 до 60 Гц, В | от 100 до 240 |
| Габаритные размеры составляющих метрологически значимой части стенда (без кабелей), мм, не более - Манипулятор UR10e (в сложенном состоянии) | |
| длина | 720 |
| ширина | 430 |
| высота | 320 |
| - Контроллер | |
| длина | 460 |
| ширина | 445 |
| высота | 260 |
| - Планшет управления | |
| длина | 300 |
| ширина | 290 |
| высота | 50 |
| - Возимая опора | |
| длина | 100 |
| ширина | 100 |
| высота | 50 |
| - Кронштейн для фиксации одной антенны | |
| длина | 85 |
| ширина | 70 |
| высота | 70 |
| - Кронштейн для фиксации системы из 3 -х антенн | |
| длина | 670 |
| ширина | 585 |
| высота | 30 |
| Наименование характеристики | Значение характеристики |
| - Аппаратура навигационная NL3 333 -A3 | |
| длина | 93 |
| ширина | 55 |
| высота | 25 |
| Масса, кг, не более: | |
| - Манипулятор UR10e | 33,3 |
| - Контроллер | 17 |
| - Планшет управления | 1,5 |
| - Возимая опора | 50 |
| - Переносной компьютер MSI GS73VR 7RF-228RU | 2,5 |
| - ГНСС антенна GrAnt-G5T | 0,5 |
| - Аппаратура навигационная NL3 333 -A3 | 0,2 |
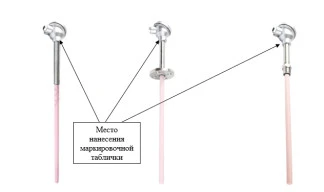
наносится на опору манипулятора в виде наклейки и на титульный лист руководства по эксплуатации в виде наклейки или типографским способом.
Таблица 4 - Комплектность СИНАКР
| Наименование | Обозначение | Количество |
| Стенд испытаний навигационной аппаратуры потребителя в кинематическом режиме в составе: | 1 комплект | |
| Манипулятор на базе робота UR10 в составе: | 1 шт. | |
| Робот-манипулятор UR10e (манипулятор, контроллер, планшет управления, кабель манипулятор - контроллер 6м, кабель питания) | 1 шт. | |
| Радиопрозрачное укрытие (РПУ) с климатической установкой и постаментом для робота | 1 шт. | |
| Возимая опора для робота | 1 шт. | |
| Кронштейн для фиксации одной антенны | 1 шт. | |
| Кронштейн для фиксации системы из 3 -х антенн | 1 шт. | |
| Кабель между манипулятором робота и контроллером, 50 м | 1 шт. | |
| Кабель высокочастотный, 50 м | 3 шт. | |
| Кабель высокочастотный, 3 м | 3 шт. | |
| Кабель витая пара, одножильный CAT6, 50 м | 1 шт. | |
| Кабель витая пара, многожильный, 3 м | 1 шт. | |
| Переносной компьютер MSI GS73VR 7RF-228RU | 1 шт. | |
| Аппаратура навигационная NL3333-A3 | ПРБД.464346.012 | 1 шт. |
| ГНСС антенна GrAnt-G5T | 1 шт. | |
| Делитель-сумматор 1/8 | ТИШЖ.468523.017 | 1 шт. |
| Концентратор USB 3.0 TP-LINK UH700 | 1 шт. | |
| IP-камера Hikvision DS-2CD2023G0-I | 1 шт. | |
| PoE-инжектор Midspan-1/300GA | 1 шт. |
| Наименование | Обозначение | Количество |
| Кабельная сборка TNC male - N-type male 2 м., RG8X | 4 шт. | |
| Кабельная сборка SMA male - N-type male 2 м., RG8X | 4 шт. | |
| Компакт-диск «Программное обеспечение СИНАКР» с установочными файлами программ 1): - Программа SINAKR RUTO^.30096-01 - Программа NMEA RU.ГЮИД.30028-01 | 1 шт. | |
| Комплект эксплуатационной документации согласно ГЮИД.464979.001 ВЭ | 1 экз. | |
| Методика поверки | 651-20-039 МП | 1 экз. |
| 1) Программы предустановлены на переносном компьютере | ||
осуществляется по документу 651-20-039 МП «ГСИ. Стенд для испытаний НАП в кинематическом режиме ГЮИД.464979.002. Методика поверки», утвержденным ФГУП «ВНИИФТРИ» 19 августа 2020 г.
Основные средства поверки:
- рабочий эталон единицы длины 2 разряда по Государственной поверочной схеме для координатно-временных средств измерений в соответствии с Приказом федерального агентства по техническому регулированию и метрологии № 2831 от 29.12.2018, предел абсолютной допускаемой погрешности измерений длины (приращений координат) (0,6+5 10-6L) мм, где L - расстояние между пунктами в мм.
Допускается применение аналогичных средств поверки, обеспечивающих определение метрологических характеристик поверяемого стенда для испытаний НАП в кинематическом режиме ГЮИД.464979.002.
Знак поверки наносится на свидетельство о поверке в виде наклейки или оттиска повери-тельного клейма.
приведены в эксплуатационном документе.
Государственная поверочная схема для координатно-временных средств измерений. Утверждена приказом № 2831 Федерального агентства по техническому регулированию и метрологии от 29 декабря 2018 г.
ГЮИД.464979.002 ТУ «Стенд испытаний навигационной аппаратуры потребителя в кинематическом режиме ГЮИД.464979.002. Технические условия»
| Зарегистрировано поверок | 4 |
| Поверителей | 1 |
| Актуальность данных | 06.12.2024 |